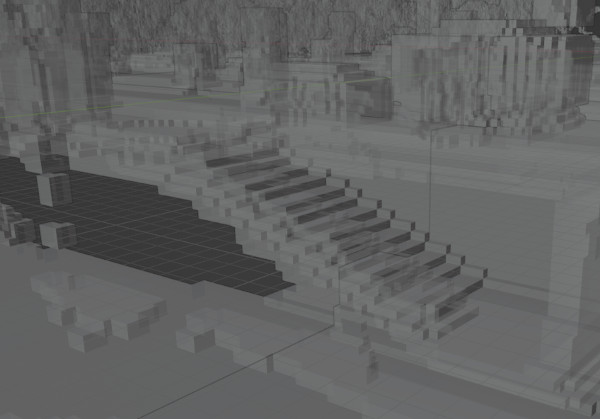
The problem with tunnels and stairs
Whenever there’s been a major incident involving emergency services in complex urban environments the inquiry report has consistently highlighted radio communications failure despite significant developments in radio communications and 3D technology since the infamous 1988 Kings Cross Fire on the London Underground. The following tragic incidents all featured tunnels, stairs and communications failure:
- The 1988 Kings Cross Fire report highlighted radio communications only worked when they were in line of sight.
- The 2007 London underground bombings report highlighted that radio communications from trains to network control were inadequate or non-existent.
- The 2017 Grenfell tower fire inquiry highlighted inadequate radio communications between the incident control on the ground floor and fire fighters higher up the tower.
Limitations of (2D) radio planning tools
Radio planning tools are not used in emergencies. They’re complicated, slow and require a lot of knowledge to produce an accurate output. Even if a skilled operator were able to model a site before the event, currently they would be expected to model each floor of a multi-story building in isolation due to the “floorplan” design of current software.
The problem is indoor planning tools are built for corporate clients to achieve seamless Wi-Fi in every corner of the office, not to help a fire chief deploy a mesh radio network down stairs and then along a tunnel. The top end tools can do limited multipath, slowly, but not as an API which can be consumed by a third party viewer…
Most radio planning tools on the market, ourselves included, have the following limitations when it comes to complex urban modelling which we will explore in detail:
Using LiDAR as a 2.5D surface model
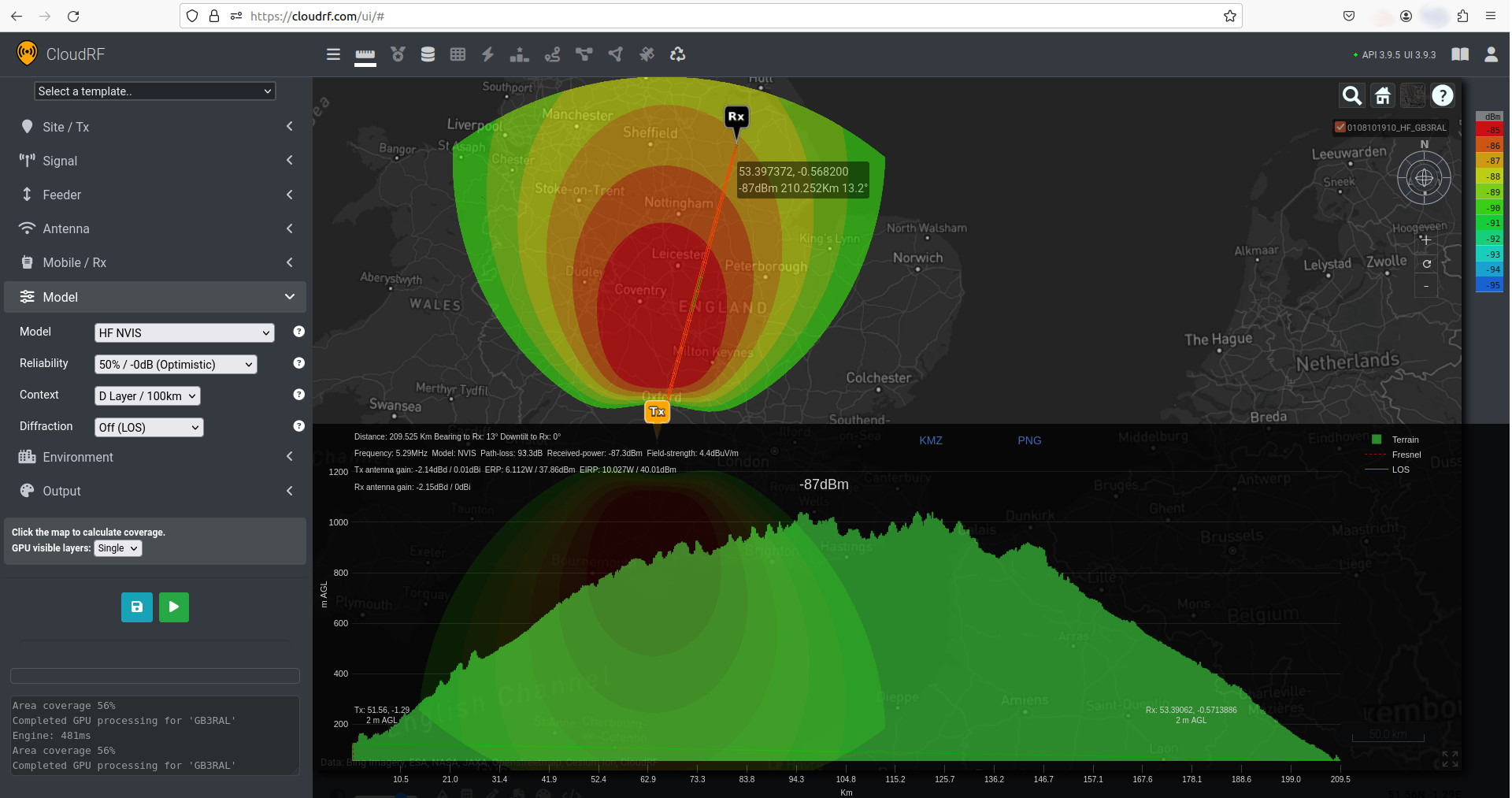
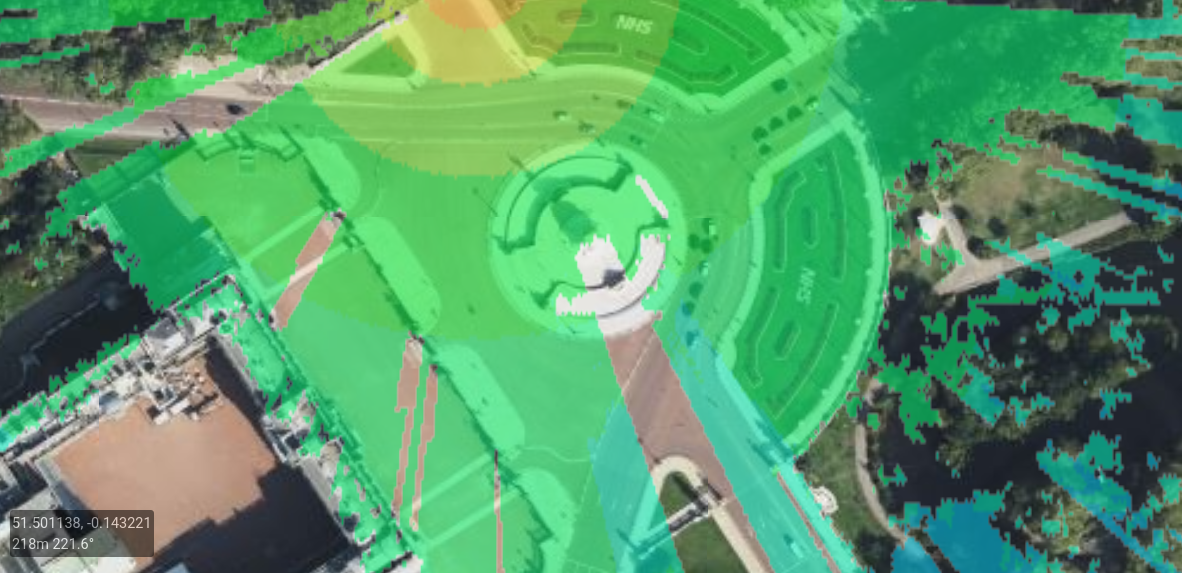
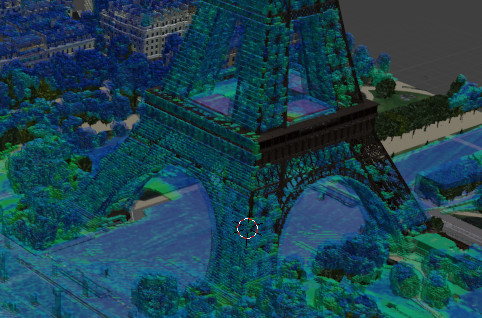
The abundance of free LiDAR data has made this high resolution data the standard for accurate outdoor RF planning and for several Fixed Wireless Access (FWA) tools, including free LiDAR based path tools, it is their core feature. We started using LiDAR in 2015 and know its limitations well; for example when point cloud LiDAR has been rasterised into GeoTIFF then it’s no longer 3D, it’s a 2.5D surface model which is useful for building heights and unsuitable for bridges, arches and tunnels.
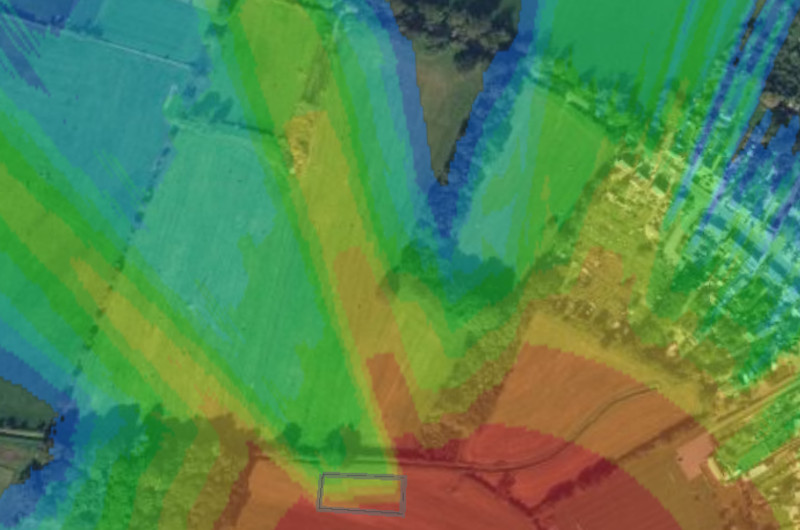
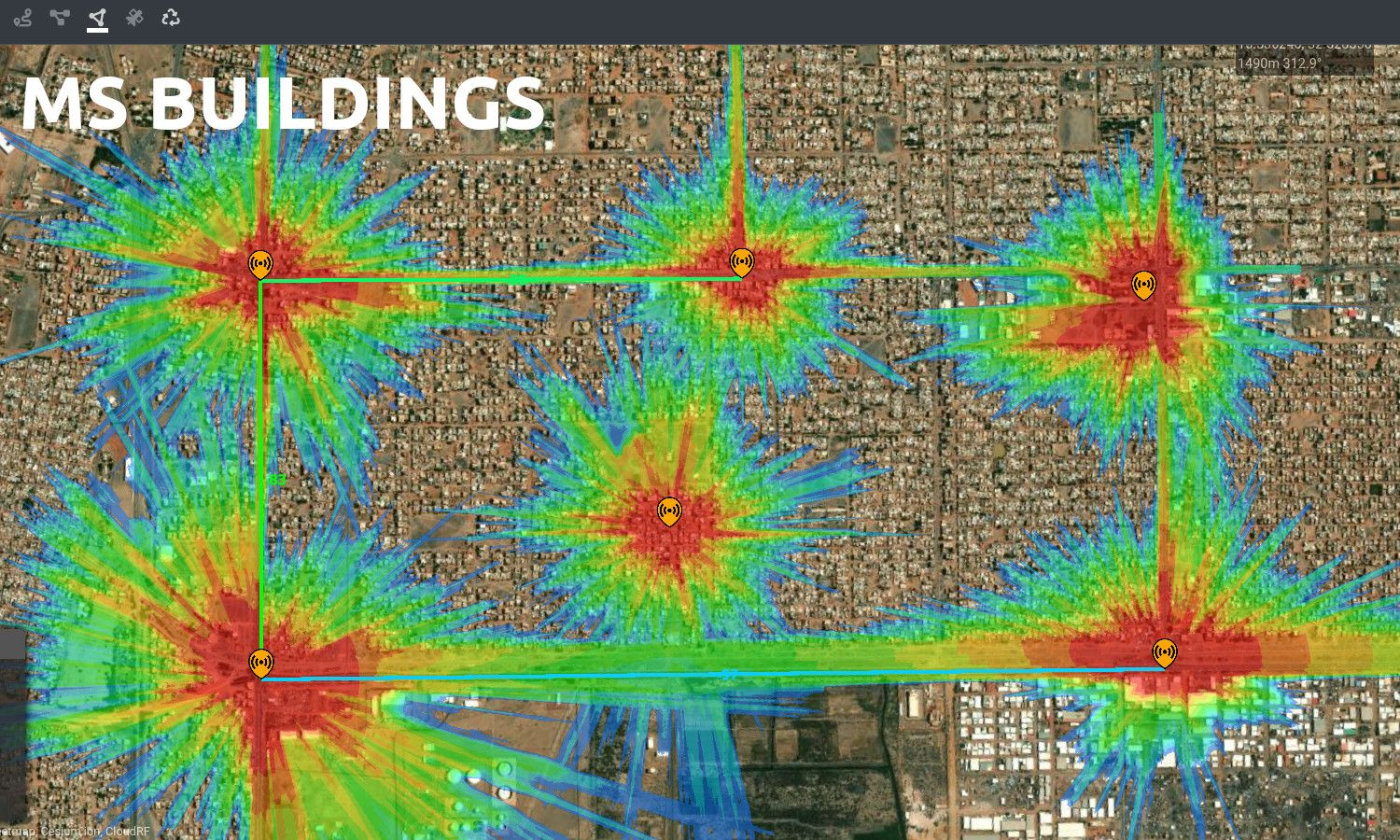
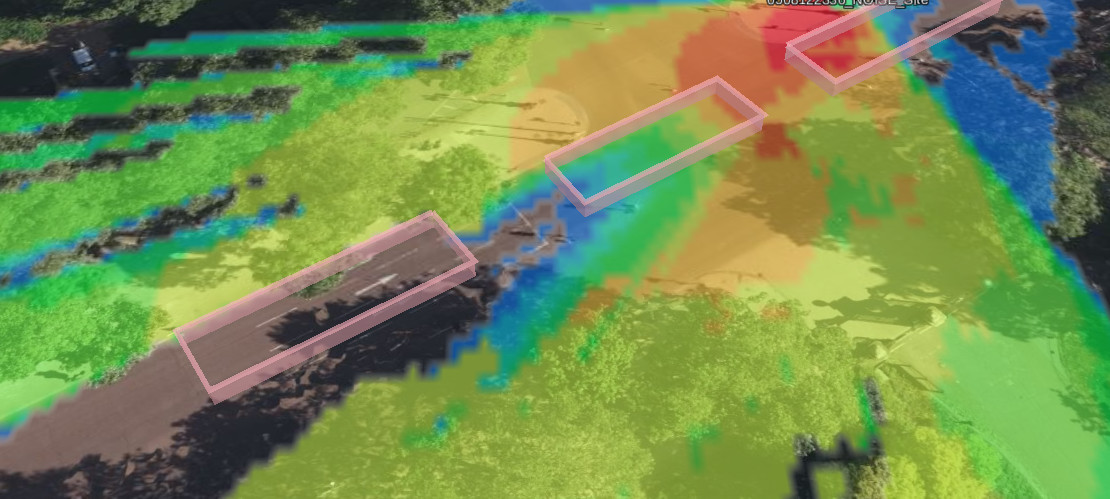
A bridge or arch in a rasterised LiDAR model extends to the ground like a wall. In the screenshot below, a large ferris wheel is blocking line of sight through it as well as the elevated rail bridge across the river which is casting a shadow much larger than it would in reality.

Using a floor plan to model a building

For indoor Wi-Fi planning tools, the start point is typically a floor plan. This does not scale well with multi-story buildings or support vertical planning as it produces a 2D image of a 2D plan.
Many tools present 2D images in a 3D viewer, as we do, but the output remains 2.5D, as with rasterised LiDAR. The significant Wi-Fi attenuation presented by solid floors makes this simplified 2D floor-by-floor planning viable for corporate clients in offices but not in challenging environments or where a floor plan does not exist.
Direct ray only
Modelling multipath, or fast fading, is much more complex than the direct ray. For this reason, most tools only do the more powerful direct ray and even then some cannot do diffraction or obstacle attenuation as we do already. For the previously mentioned Wi-Fi planning tools, the current standard is to model obstacle attenuation only. By doing this a tool is able to simulate most of the coverage quickly for a given floor but for complete accuracy it must be augmented by a walk survey, which isn’t so quick. For some customers, a walk survey is just not possible.
Multipath effects will increase coverage beyond a direct ray simulation and cause phase issues like signal dead-spots and doppler spread where reflections increase bandwidth and overall noise. This effect can be observed indirectly via customer reviews for urban WISPs where people state their once good link quality reduced as more neighbours subscribed.
A 3D multipath API for 2024
We’ve been working on this full 3D capability since the 2022 Grenfell inquiry with valuable input from firefighters, mining experts and MANET radio OEMs. The first version of the engine is done and we’re onto API integration now.
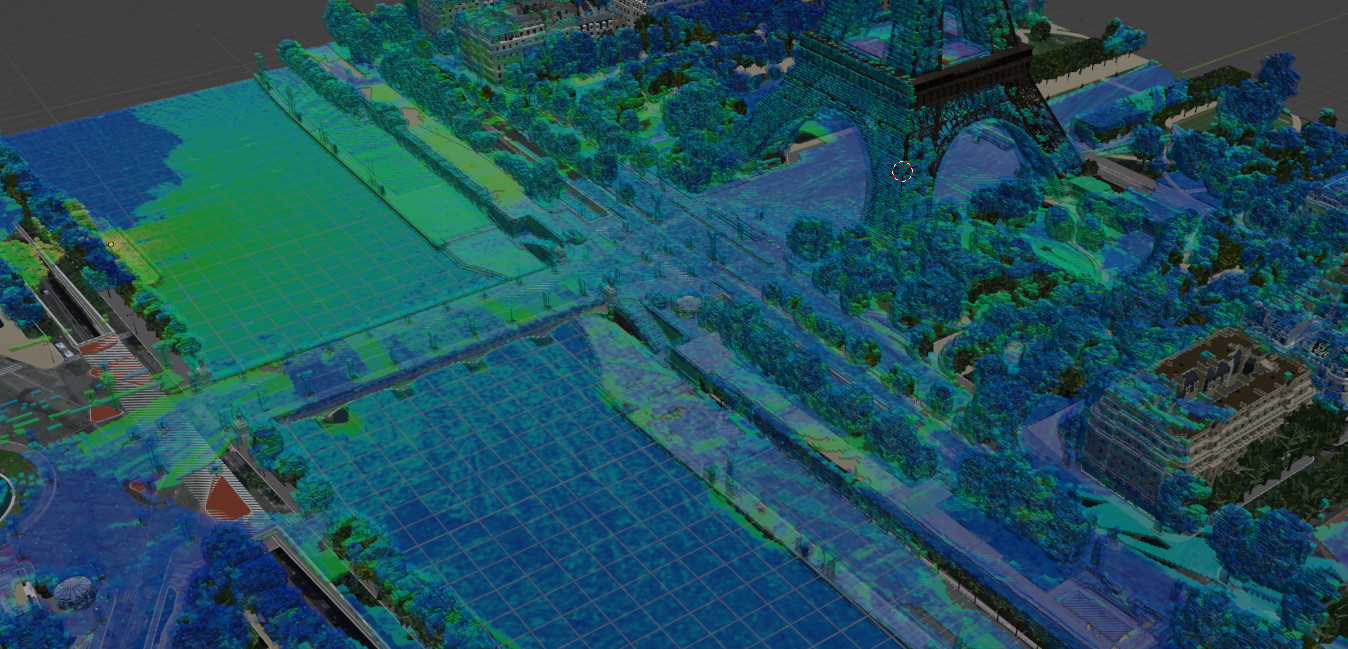
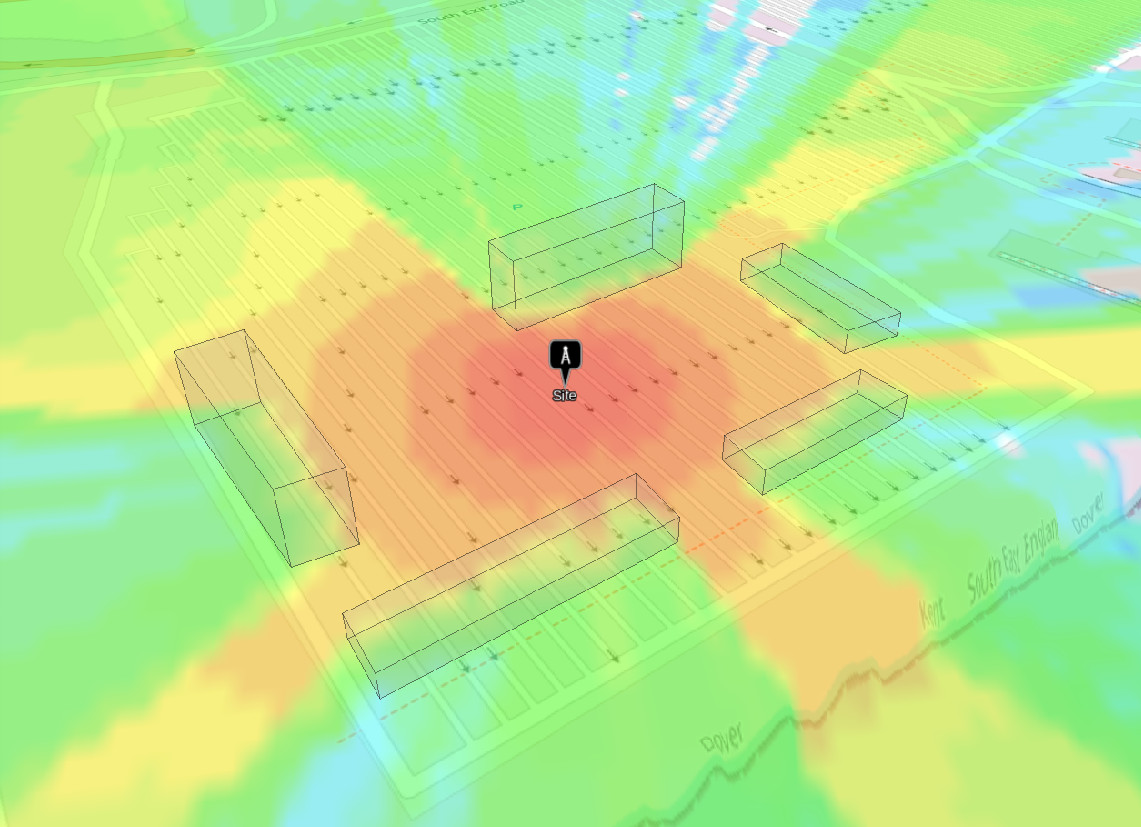
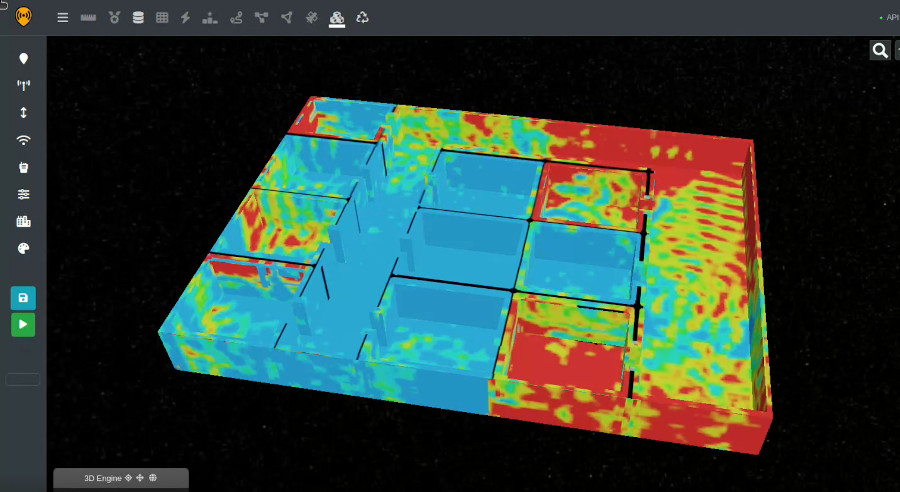
Our GPU based design takes a 3D model, simulates propagation in all directions irrespective of floors including configurable reflections, surface refractivity, material attenuation and crucially it outputs to the open 3D standard glTF. It scales from small rooms to suburbs and everything in between so will be used for tunnels, multi-story buildings and outdoor multipath.
It will be integrated into our API first so other standards compliant viewers can visualise it and will then be integrated into our own 3D user interface. We can’t say what interfaces people will be using in the future but are confident that by aiming for open standards APIs we will ensure compatibility with phones, glasses and holograms.
Done

Read LiDAR into a 3D volume
Prepare a volume from a LAS/LAZ LiDAR scan.
Done
Direct ray with attenuation
Model direct ray with configurable attenuation in dB/m for obstacles
Done

Reflections
Model reflections accurately based on the wavelength and angle of incidence
Done

Phase tracking
Track the phase to show constructive and destructive interference (fast fading) eg. dead spots, cured by a little movement 😉
Done
BIM / glTF support
Read and write BIM models as the open standard glTF “3d tiles” format.
Under development
API integration
Integrate engine into the CloudRF API so a BIM/LAS model can be uploaded and used via our standard JSON requests.
Under development
3D tiles web interface integration
Add 3D tiles output to 3D web interface. Some interfaces already supported 🙂
Commercial plan
The 3D engine API will be a new feature within CloudRF Gold plans and our SOOTHSAYER server at no additional cost. It requires a GPU. We’re aiming to get a beta up on CloudRF in May/June and to ship this with the next major SOOTHSAYER release, currently scheduled for September.
Users will be allowed to upload models within their storage limits and execution time / accuracy will be scaled to fit within a reasonable time. Limits will be relaxed on SOOTHSAYER.
We are partnering with open standards based companies to integrate this into different viewers. One exciting partner we are working with now is Avalon Holographics. Their revolutionary display is able to display our rich engine output in a hologram format so it can be explored in three dimensions for maximum spatial awareness without additional hardware for viewers.
If you would like to get our open standard glTF models into your viewer, get in touch. If you can bring challenging BIM models or LiDAR scans of real tunnels and large buildings we would really like to talk to you.